













노바는 모벤시스의 모션 제어 솔루션인 WMX와 MIT 기반 자율주행 기술을 소프트웨어 단계에서 결합한 솔루션이다. 노바는 세계 최초로 별도의 보드, 하드웨어 없이 단 하나의 소프트웨어만으로 구성됐으며, 자율주행, 로봇 및 바퀴를 실시간 제어할 수 있다. 이를 통해 AMR 내 로봇, 바퀴, 그리고 자율주행으로 구성돼 있던 다수의 제어기들을 하나의 소프트웨어로 대체해 배터리 및 전장 공간의 효율성을 최적화할 수 있으며, 위치 및 동작 정밀도를 크게 향상시킬 수 있었다는 설명이다. 특히, 최근 고객사 실증 테스트를 통해 기존 제어 시스템 대비 전장 공간은 약 40% 감소됐으며, 로봇의 이동 속도는 약 33% 빨라졌다. 또한 로봇 팔의 정밀도는 약 85% 개선되었으며, 제품 생산 시간 단축을 통해 작업 생산성을 약 58% 향상시키는 결과를 확보했다고 밝혔다.
이와 더불어 모벤시스는 2027년 6월까지 자회사 스카일라 테크놀로지스(이하 Skylla), 고려대학교와 함께 노바에 생성형 AI(Artificial Intelligence) 기술을 접목하여 자율주행로봇이 공정 내 작업자와 대화하며 협업할 수 있는 기술을 개발 중에 있다.
 이미지 확대보기
이미지 확대보기
이번 발표는 모벤시스가 주최한 프라이빗 쇼에서 진행되었으며, 노바 외에도 생성형 AI 등 다양한 최신 IT 기술과 융합한 새로운 제어의 모습을 보여주는 다른 데모 장비도 구현하였다. 특히 지난 10월에는 산업 자동화 솔루션의 글로벌 리딩 업체인 미쓰비시 전기 그룹의 케이 우루마(Kei Uruma) 대표이사가 직접 모벤시스 본사를 방문하여 장시간 데모 관람 및 향후 협력 방안에 대한 논의를 진행하였다. 우루마 대표는 데모 관람 후 "자극적이었다. 자사 또한 비슷한 기술 융합을 진행하고 있는데, 모벤시스는 하드웨어의 제한된 성능과 연결성을 벗어나 소프트웨어를 통해 손쉽게 새로운 융합 기술을 구현한 것이 인상적이었다"고 평가했다.
양 사는 2023년 전략적 사업 협력 관계를 체결하였으며, 향후 한국뿐 아니라 아시아 전역에 걸쳐 보다 긴밀한 기술 개발 및 사업적 협업 방안을 모색하기로 하였다.
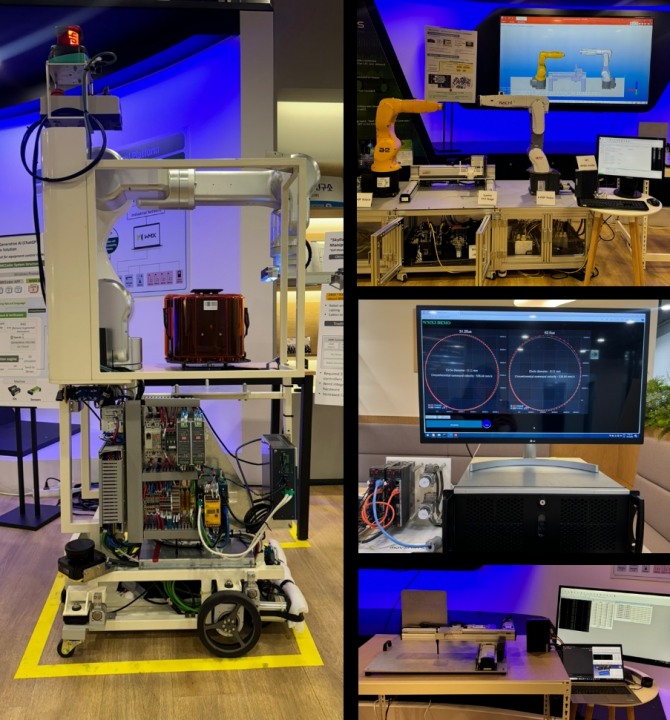
이번 모벤시스 프라이빗 쇼에서는 노바를 포함한 4가지 핵심 기술이 시연되었다. 노바가 적용된 MoMa는 자율주행 중 기민한 회피뿐 아니라 좁은 공간 내 회전 등을 통해 고정밀의 기동성 높은 성능을 보여주었다.
두 번째 데모는 하나의 WMX 소프트웨어를 통해 이종 로봇 및 서보 간의 고정밀 동기 제어를 구현한 것이다. 일반적인 6축 로봇의 전용 하드웨어 제어기 없이 WMX만으로 그 이상의 고정밀 동기 제어를 실현한 것이 가장 큰 차별점이다.
세 번째 데모는 CC-Link IE TSN 네트워크를 통해 세계에서 가장 빠른 31.25μs 통신 주기의 2축 동기 제어를 구현한 것이다. 이는 WMX의 압도적인 소프트 마스터 성능을 보여주는 것이며, 향후 더욱 정교해지고, 세밀해지는 초정밀 모션 제어 영역을 선도해 나갈 기술로 풀이된다.
마지막 데모는 생성형 AI(Artificial Intelligence)와 WMX를 결합하여 자연어로 실제 로봇과 장비를 제어할 수 있는 노코드 솔루션이다. 기계어를 모르는 사람도 일반 자연어를 통해 장비의 시퀀스 프로그램을 작성할 수 있도록 하여 WMX 적용의 진입 장벽을 없애는 역할을 할 것으로 기대된다.
 이미지 확대보기
이미지 확대보기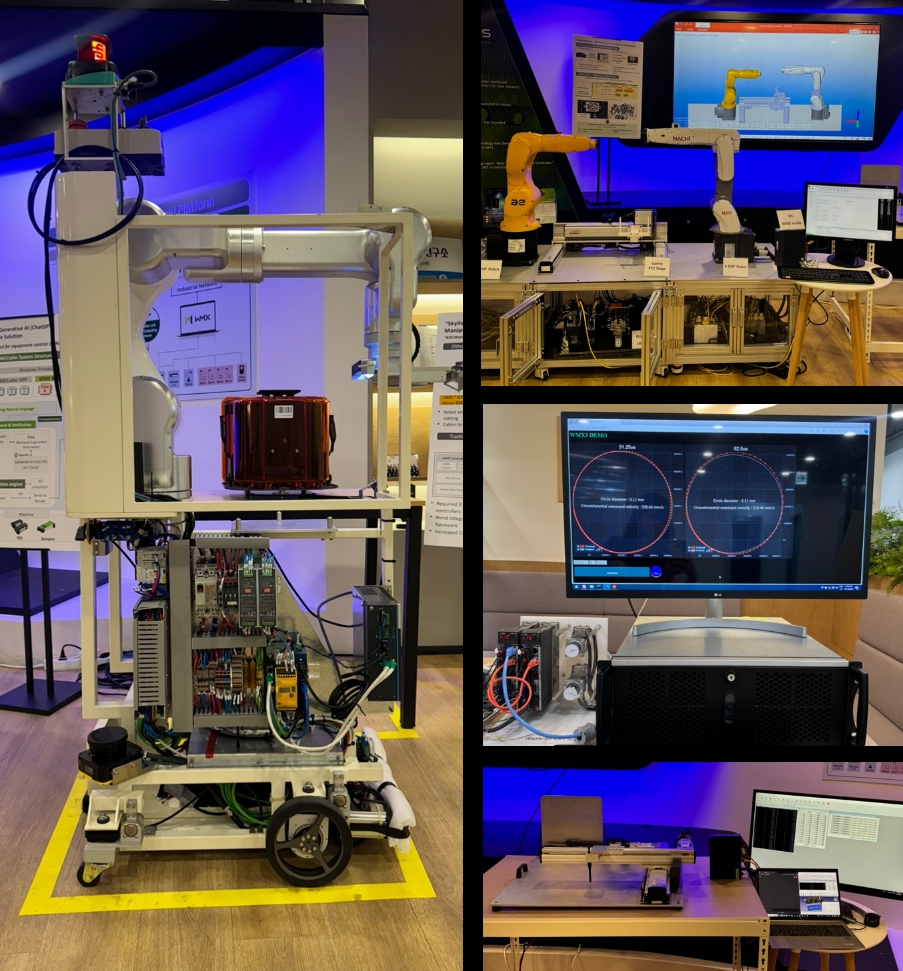
모벤시스는 향후 WMX의 본질인 모션 제어 안정성 강화 및 성능 고도화를 지속 연구함과 동시에 LLM(Large Language Model) 등 다양한 신규 기술들과의 융합을 끊임없이 추진해 나갈 예정이다.
모벤시스 양부호 회장은 "모벤시스의 정체성은 지속적인 기술 혁신을 이어가는 것이며, 이를 위해 미쓰비시 전기를 비롯한 다양한 기술 및 시장 선도 업체들과 더욱 협력해 나갈 것"이라고 전했다.
이상훈 글로벌이코노믹 기자 sanghoon@g-enews.com



![[독일, 탈산업화의 그림자(중)] "굿바이, 독일"…균열하는 '메이드 인 저머니'](https://nimage.g-enews.com/phpwas/restmb_setimgmake.php?w=184&h=118&m=1&simg=2025010116435101575fbbec65dfb211197141232.jpg)

![[초점] 美 고물가 속에서도 가격 내린 일부 생필품들](https://nimage.g-enews.com/phpwas/restmb_setimgmake.php?w=184&h=118&m=1&simg=20250102074104045469a1f3094311109215171.jpg)












![[초점] 애플 보급형 아이폰 SE, ‘아이폰 16E’로 대체될 듯](https://nimage.g-enews.com/phpwas/restmb_setimgmake.php?w=80&h=60&m=1&simg=2025010216040406480c35228d2f521121712889.jpg)
























